Vai al contenuto principale
×
Questo sito utilizza i cookie per consentire un accesso più facile ed efficiente ai contenuti ospitati. Chiudendo questo avviso si conferma di aver letto l'informativa sull'utilizzo dei cookie.
Course search
Chiudi
Course search
Toggle search input
Italiano (it)
English (en)
Italiano (it)
Log in
ROBOTICA INDUSTRIALE
Course search
Chiudi
Course search
Toggle search input
Corsi
Innovazione didattica
ROBOTICA INDUSTRIALE
Indice degli argomenti
Corso di Robotica industriale
Introduzione alla Robotica Industriale
Cosa fa un robot industriale? (video)
URL
Generalità sui robot industriali
File
Preparazione alla verifica scritta
File
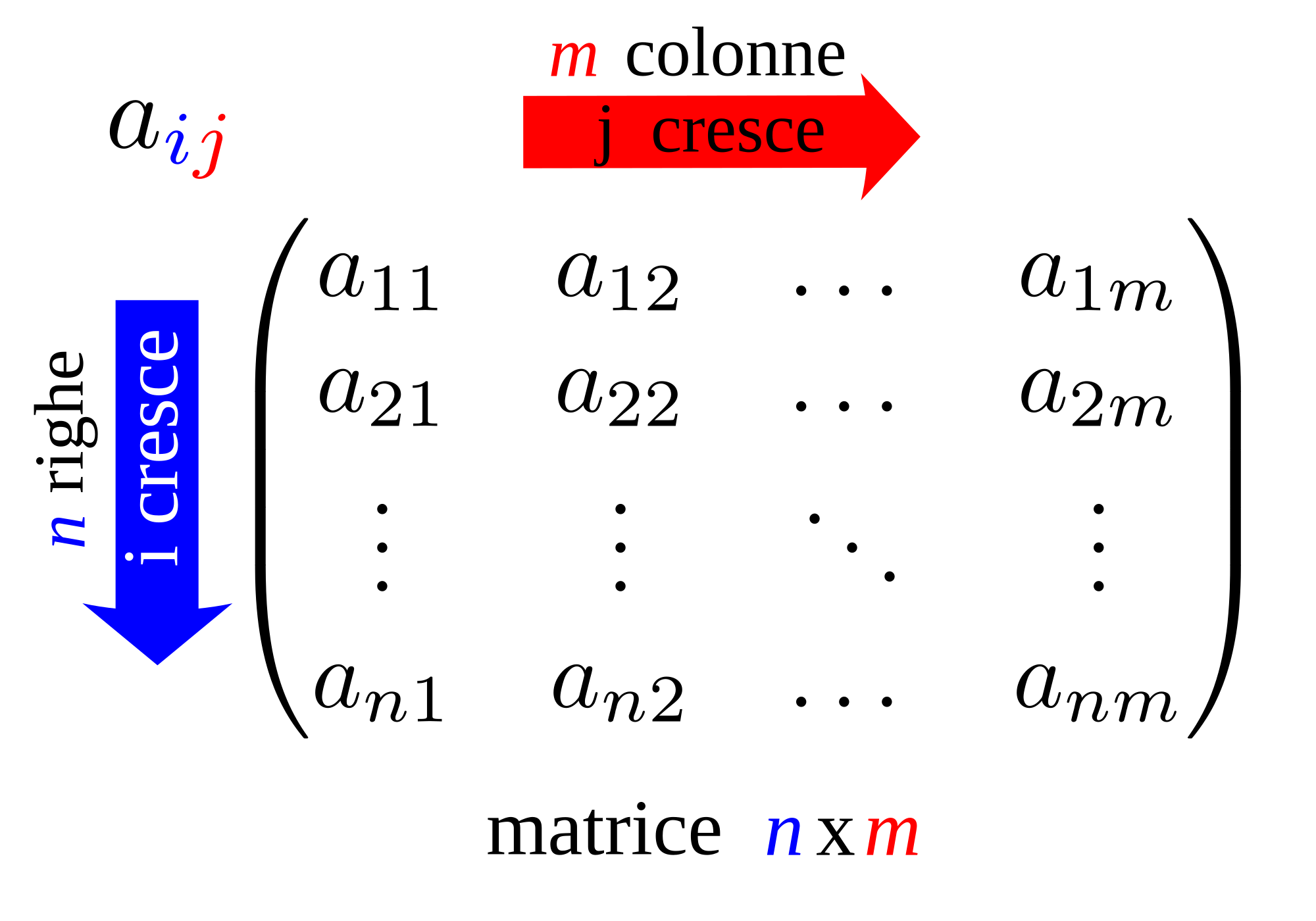
Vettori, matrici, traslazioni, rotazioni. Sistemi di coordinate
Fondamenti sulle Matrici
File
Simulazione Verifica Matrici
File
Le Rotazioni (teoria/slide)
File
Prospetto PO
File
EXP RTomogenee
File
Domande fondamentali ed avanzate (x interrogazione orale)
Pagina
Dimostrazione P&O (video, fino a 2:33)
URL
Quiz "fake"
Quiz finale sulle RotoTraslazioni (+omogenee)
Quiz finale sulle RotoTraslazioni (+omogenee) (more time)
Cinematica dei robot
Cinematica diretta con Robot 2D RR (jamboard del prof)
File
Cinematica diretta (scansione libro)
File
EXP Robot 2DoF
File
DH essentials
File
Esempio applicazione di Denavit-Hartenberg (video)
URL
Trasformazione di Denavit-Hartenberg (video)
URL
Quiz su DH (2)
Cinematica inversa (scansione libro)
File
Simulatori
ROKISIM
Link al sito
URL
Video tutorial (in english, caption possible)
URL
Esercitazione con Rokisim
Pagina
30" per vedere la meccanica interna di un robot
URL
Simulazione e programmazione con Rokisim (Advanced)
URL
BONUS a chi crea un tutorial su Rokisim-Advanced
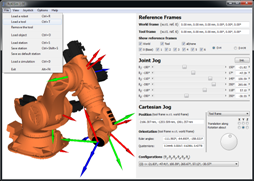
RoboAnalyzer
Link al sito
URL
User Manual
File
Esercitarsi con RoboAnalyzer (vademecum)
Pagina
Python
Guida Python
URL
Interprete on-line (Python 2.7)
URL
Portable Python (download)
URL
IDLE : un IDE per Python
URL
Programmi di esempio
Cartella
Esercizi
Pagina
Manuale Mymatrix
File
Tinkerkit
Come assemblare Tinkerkit (video)
URL
Manuale
File
Conclusione
 ROKISIM
ROKISIM


{kind=link}